




¿Desea solicitar presupuesto de varios productos? Puede continuar añadiendo productos a la Lista a presupuestar.

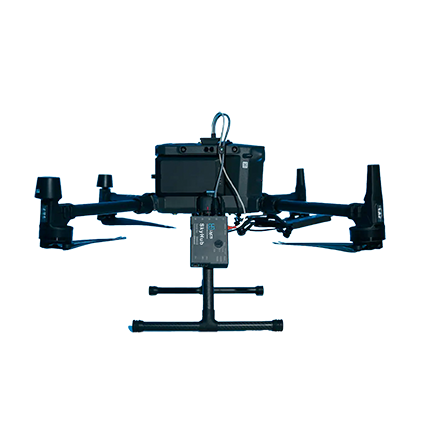

SkyHub Ordenador a bordo para dron
SkyHub es un Ordenador de a bordo diseñado para mejorar las capacidades de los vehículos aéreos no tripulados comerciales con fines industriales para registrar datos geoetiquetados de varios sensores, y recoger y almacenar datos adquiridos por un sensor de a bordo con radar de altitud. Ordenador de a bordo para dron para una carga útil segura e integración de sensores. Realice un GPR, magnetómetro, ecosonda o estudio de detección de metano utilizando un dron y el ordenador de a bordo SkyHub.
- Convertir & registrar datos (incluido el geoetiquetado) en un formato adecuado para su procesamiento y análisis
- Proporcionar numerosos tipos de archivos para su descarga y procesamiento y análisis con software específico
- Comunicarse con el controlador de vuelo del dron para adquirir los parámetros del mismo
- Implementar algoritmos de control de vuelos personalizados
- Proporcionar diagnósticos ampliados del UAV
¿Qué es un ordenador de a bordo para drones?
- SkyHub es una computadora a bordo de drones que amplía las capacidades de los UAV comerciales para la detección y automatización industrial. Actuando como el centro central entre el controlador de vuelo y las cargas útiles, permite el manejo seguro de datos, el geoetiquetado sincronizado y la integración de carga útil de drones sin interrupciones.
- Con SkyHub, sus datos siempre están protegidos. Todos los datos de la misión se registran fuera de línea en formatos estándar como CSV, SEG-Y y NMEA-0183. Esto garantiza la máxima seguridad, exactitud y confidencialidad.
- El sistema también admite la salida de flujo de coordenadas NMEA a sensores externos, lo que permite una sincronización precisa de tiempo y posición para cada conjunto de datos y elimina la necesidad de receptores GNSS adicionales en el drone.
- Desarrollado para integrar sensores que incluyen GPR, magnetómetros, ecosondas, detectores de metano, detectores de metales, gamma-ray.
Cómo funciona
- Implementación de True Terrain Following para drones DJI para mantener automáticamente la elevación constante sobre la superficie utilizando datos en tiempo real del radar o altímetro láser.
- Implementación del modo Grasshopper, cuando un avión no tripulado está volando entre puntos de ruta a una altitud segura y desciende en waypoints a una altitud establecida para realizar mediciones (usando el sensor NDT, ecosonda, etc.) o para dejar caer un paquete o sensor sísmico.
- Recogida de datos de sensores como GPR, detector de metano, magnetómetro, ecosonda, contador de radiación gamma, etc. que no tienen un registrador de datos interno. Los datos se registran en formato CSV así como en los formatos compatibles con software especializado para el procesamiento de datos de sensores (SEG-Y, NMEA-0183, SVLOG, etc.)
- Fusión de datos de carga útil y telemetría de piloto automático. Los datos sin coordenadas (no geoetagados) son en la mayoría de los casos inútiles. SkyHub utiliza información de posicionamiento desde el drone hasta los datos de sensores de geoetiqueta.
- SkyHub puede suministrar flujo de coordenadas NMEA a un sensor externo. Algunos sensores tienen registradores de datos internos, pero requieren un receptor GPS externo. SkyHub puede sustituir los receptores GPS por dichos sensores.
- Soporte para un detector externo de obstáculos para salvar el drone.
Modos True Terrain Follow (TTF) y Grasshopper
- Cómo funciona TTF. True Terrain Following (TTF) permite a un avión no tripulado mantener automáticamente una altitud constante sobre el suelo o el agua en función de las lecturas de los altímetros en tiempo real. Esto asegura que la altura de vuelo se mantenga estable, incluso sobre terrenos irregulares o superficies variables como pendientes, vegetación o masas de agua.
- Grasshopper: descensos a punta para mediciones. El modo Grasshopper permite que el UAV realice descensos precisos basados en puntos a una altura predefinida para la recopilación de datos antes de volver a su altitud de vuelo. Este modo es particularmente útil para mediciones que requieren proximidad directa a la superficie, tales como muestreo de agua, sondeo de eco o lecturas geofísicas específicas.

- Cuándo usarlos. Tanto TTF como Grasshopper sirven para garantizar la calidad de los datos y la seguridad operativa, pero son adecuados para diferentes escenarios de encuestas:
- TTF es esencial cuando se mantiene una distancia constante entre el sensor y la superficie. Por ejemplo, el radar de penetración en tierra (GPR), los magnetómetros y las herramientas de inducción electromagnética (EMI) se basan en una altitud estable para recopilar datos precisos y consistentes.
- El Grasshopper es ideal cuando el UAV debe acercarse brevemente a la superficie en puntos específicos. Por ejemplo, se utiliza en encuestas batimétricas con sondas de eco o mediciones ambientales que requieren lecturas de contacto o de contacto cercano.
- En ambos casos, TTF mejora la seguridad de vuelo a altitudes muy bajas y ayuda a cumplir con los requisitos reglamentarios (dependientes del país).
• Altímetros compatibles. TTF y Grasshopper son compatibles con dos tipos de altímetros integrados en el ordenador de a bordo SkyHub: altímetros de radar y láser. La elección depende de las condiciones de la superficie, el tipo de sensor y el entorno operativo.
| Plataforma | Modelos soportados | Interface de conexión | Protocolo de comunicación | Alimentación |
|---|---|---|---|---|
| DJI Enterprise Drones | M400, M350 RTK, M300 RTK | DJI PSDK connector | DJI PSDK | Desde la batería del drone (12–24 V) |